|
|

|

|
| e-Pub |
Section: New Results
Multi-camera Multi-object Tracking and Trajectory Fusion
Participants : Kanishka Nithin Dhandapani, Thi Lan Anh Nguyen, Julien Badie, François Brémond.
Keywords: Multicamera, Tracklet association, Trajectory fusion, Object Tracking.
In spite of number of solutions that exist for multi-object tracking, it is still considered most challenging and unsolved computer vision problems, mainly due to inter and intra-occlusions, inferior visibility in crowed scenes, object re-entry, abrupt movement of object, placement of cameras and other detection inaccuracies that occur in single camera. Such drawbacks in single-camera multi-target tracking can be solved to an extent by obtaining more visual information on the same scene (more cameras). Few works done in the past years are [50] , [79] , [65] , [59] . However they have their own problems such as not real run time performance, complex optimizations, hypothesizing 3D reconstruction and data association together might lead to suboptimal solutions.
We present a multi-camera tracking approach that associates and performs late fusion of trajectories in a centralized manner from distributed cameras. We use multiple views of the same scene to recover information that might be missing in a particular view. For detection we use background subtraction followed by discriminatively Trained Part Based Models . For object tracking, we use an object appearance-based tracking algorithm introduced by Chau et al [54] that combines a large set of appearance features such as 2D size, 3D displacement, colour histogram, and dominant colour to increase the robustness of the tracker to manage occlusion cases. Each camera in the network runs the detection and tracking chain independent of each other in a distributed manner. After a batch of frames, the data from each camera is gathered to a central node by projecting the trajectories of people to the camera with the most inclusive view through a planar homography technique and then global association and fusion are performed. Unlike the temporally local (frame to frame) data-association method, global data association has ability to deal with challenges posed by noisy detections. Global association also increases the temporal stride under optimization, therefore more stable and discriminative properties of targets can be used. Trajectory similarities are calculated as heuristically weighted combination of individual features based on geometry, appearance and motion. Association is modeled as a complete K-partite graph (all pairwise relationships inside the temporal window are taken into account) K corresponds to number of cameras in network. For simplicity purpose, we use K=2. Since we use complete K-partite graph, we have an optimal solution. Whereas methods that model association as complex multivariate optimization, upon scaling, face the problem of being stuck at local minima and may provide sub-optimal solutions. Fusion is performed using adaptive weighting method. Where the weights are derived from reliability attribute of each tracker. This enables correct and consistent trajectories after fusion even if the individual trajectories have inherent noises, occlusion and false positives
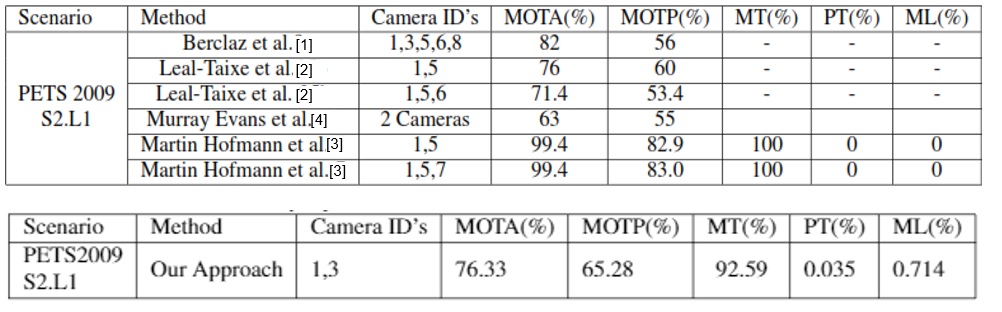
Our approach is evaluated on the publicly available PETS2009 dataset. PETS2009 is a challenging dataset due to its low FPS and interobject occlusions . We choose View1,View3 and View5 in S2.L1 scenario to evaluate. The results can be seen in Figure 14
The results are encouraging and are very raw and preliminary with lot of scope and room for improvement. With more fine tuning, error rate can be improved. However too significant errors in people detection to build on top of it. Thus, we need training detector on specific datasets to improve the approach. As future work, we will study if we can improve the optimization stage with a more complex optimization using minimal graph flow would improve the results drastically.